この研究は過去に行われていた研究です。
概要
琵琶湖に沈む遺構や遺物を水中ロボットで調査・発掘する場合に、通常のカメラでは泥や土が舞い上がり対象物を把握しにくい。そのため泥や土を画像処理により除去して、対象物を正確に把握することを目的とした研究を立命館大学理工学部ロボティクス学科運動知能研究室の川村貞夫教授と合同で行っている。 この研究で成果を収めることができれば遺構だけでなくロボットで引き上げることのできない大きな遺物もどの様な物かを正確に把握でき、歴史・文化的な価値のある発見に繋がる可能性がある。 また、この研究・実験の副次的結果から興味深いものが得られるのではないかと期待している。
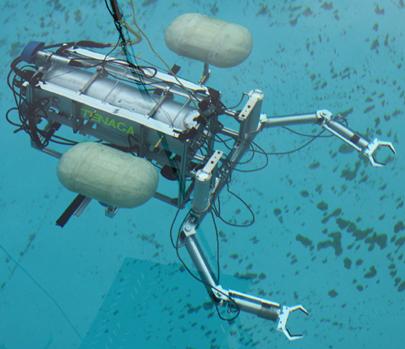
川村研究室のロボット(http://www.ritsumei.ac.jp/se/~kawamura/)

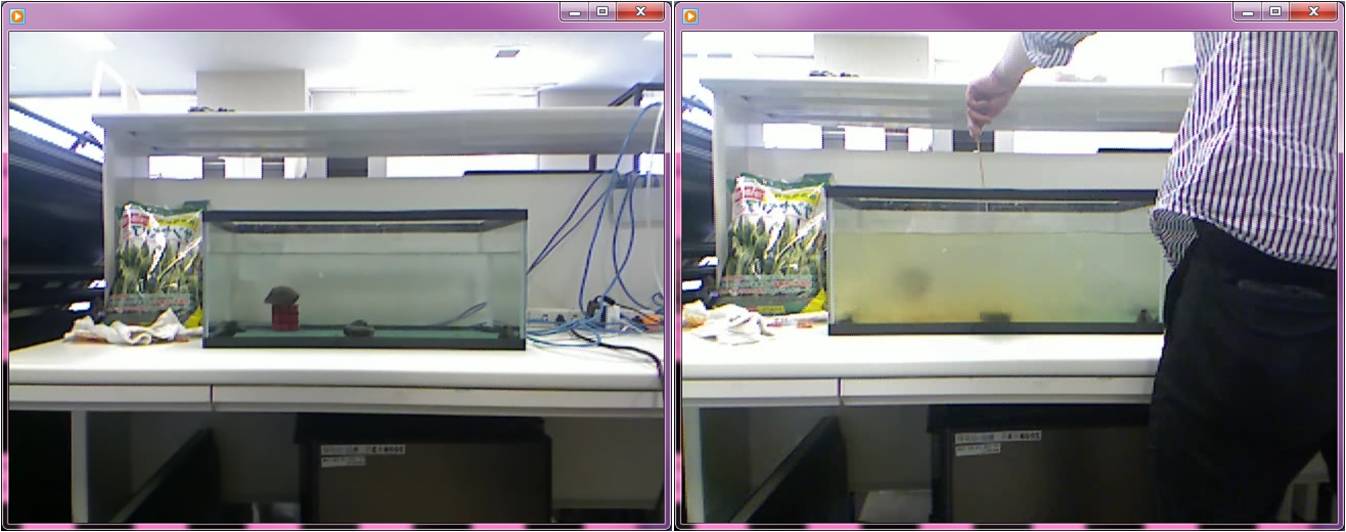
実際の実験は、水槽にルービックキューブを沈めて水に砂を混ぜて行っている。将来的には、川村研究室が所有している実験施設での研究を行う。
現在はKinect を用いて距離データを測りどの様にデータが取れているのか、砂や泥の先のデータが取れているのかを調べている。距離データは可視化している。現在の結果では水槽面での反射や太陽光による影響で上手くデータを取れていないことが多いことから偏光板を使用しての実験も視野にいれている。

今後はKinectだけではなくステレオカメラ、Kinect2といった別のシステムでデータを取得するものではどの様にデータが取れるのかを調べる。