背景と目的
移動車班では、「人と共生し、人を支える福祉用サービスロボット」というコンセプトから、主に家庭内でのナビゲーションを想定したシステムの構築を目指し、周囲の環境を把握して自律的に障害物を避けながら行動するロボットの研究を行っています。
近年におけるロボット技術の進歩に伴い、自律的に目的地に到達することが出来るロボットの導入が期待されています。
このようなロボットを実現するために、台車には全方向移動車を使用し、その上にステレオカメラとノートPCを搭載して環境認識と移動を行うことで、さらなるロボット技術の進歩に貢献することを目指します。
現在の研究内容
現在、縦と横に合計3個カメラが配置されたステレオカメラを使用して3眼視を行う”Trinocular Stereo Vision”と、市販のWebカメラなどの単眼カメラを使用して単眼視を行う”Motion Stereo Vision”、そしてロボットを目的地まで自律制御により
移動、障害物回避を行う”Autonomous Movement”を主な研究内容として研究を行っています。
縦横合計3個のカメラからの3眼視のメリットは、縦ペアと横ペアのカメラでステレオ対応付けを行うことで、2眼視でのステレオ視よりも誤対応を少なくできることにあります。一方単眼視では、1個のカメラのみ用意すればよいので、複数個使用するときよりもコストを低く抑えることができます。自律移動はソナーを用いて予期せぬ障害物からの衝突回避を行います。
[1]視差情報を用いた自律移動ロボットのための障害物地図の生成
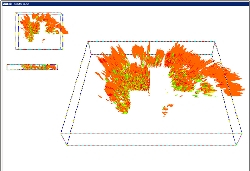
本研究では、まず初期観測により求まった三次元の障害物地図(障害物が存在する度合いの地図)を作成します。
その上でロボットの自己位置情報、障害物の存在確率で表現された地図を、自己位置を推定しながら更新し、より精度の高い地図を生成します。
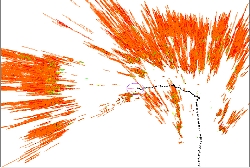
これによってより安全に経路を選択できるようにするのが目的です。
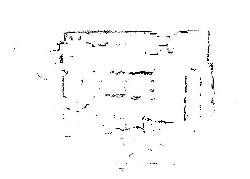
[2]レーザーレンジファインダーを用いた地図の作成と移動
本研究では、レーザーレンジファインダーで外界情報を得て、移動車に搭載されたエンコーダによる自己位置情報から、地図を作成します。上記[1]の視差情報による手法に比べ、比較的短時間で地図を作製できるのが特徴です。そして、その地図を用いて、自己位置推定を行いながら、目的地まで走行することを目的としています。

過去の研究内容
[3]障害物回避を可能とする目標座標への自律移動制御の確立
本研究では与えられた地図と現在地と目的地のそれぞれの座標と姿勢を入力情報として持つものとします。その上で、地図中における移動可能な
空間を抽出、細線化して経路となりうる領域を求めます。経路はダイクストラのアルゴリズムで最短経路を導きます。
次に自律移動ロボットが目標座標値、目標姿勢までに急激にハンドル角を切らずになめらかに移動するために、Astolfiの不連続フィードバック制御則を
用いました。また、障害物回避には、搭載ソナーによる簡易な回避を行います。
[4]三眼視を用いた環境地図生成と単眼視によるロボットのナビゲーション (修了生 小川)

本研究では、3眼視により高精度な初期地図を生成する地図生成ロボットと、単眼のみを用いて移動しサービスを提供する作業ロボットの2種類のロボットに役割を分担し、実働時におけるコストを削減する手法を提案します。まず、地図生成ロボットが人の誘導により未知環境の観測を行います。次に、観測されたランドマークを用いて高精度な地図を生成します。これにより、作業ロボットは、現在の入力画像(単眼)と地図をマッチングすることによって自己位置を高精度に推定し、目的地へ移動することができます。