活動中研究グループ
対話知能グループ
 人間と自然言語を用いて対話する能力をロボットに持たせる技術を研究しています。とくに研究室のような複数のメンバーが活動する環境において、会議をいつどこで行うか、本や道具を誰が持っていったか、ある人が今どこに行っていてがいつ部屋に戻ってくるか、などの情報を、ロボット自身が自由に移動しながら収集・提供が行えるロボットの開発を目指しています。 人間と自然言語を用いて対話する能力をロボットに持たせる技術を研究しています。とくに研究室のような複数のメンバーが活動する環境において、会議をいつどこで行うか、本や道具を誰が持っていったか、ある人が今どこに行っていてがいつ部屋に戻ってくるか、などの情報を、ロボット自身が自由に移動しながら収集・提供が行えるロボットの開発を目指しています。
|
|
|
インタラクションデザイングループ
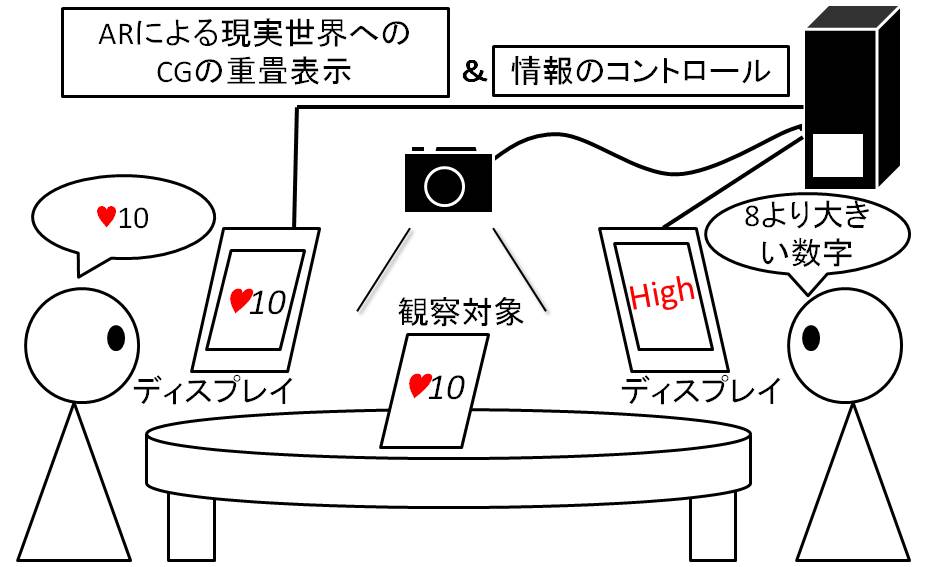 ユーザビリティやエンタテインメント性を考慮した快適なインタフェースを開発することを目標とし,
拡張現実感のエンタテインメント応用,作文支援システム,ファイル推薦システムの3種類の研究を行っています.
右上図は,ARカードゲームシステムのコンセプト図です.
ユーザビリティやエンタテインメント性を考慮した快適なインタフェースを開発することを目標とし,
拡張現実感のエンタテインメント応用,作文支援システム,ファイル推薦システムの3種類の研究を行っています.
右上図は,ARカードゲームシステムのコンセプト図です.
|
|
|
室内監視グループ
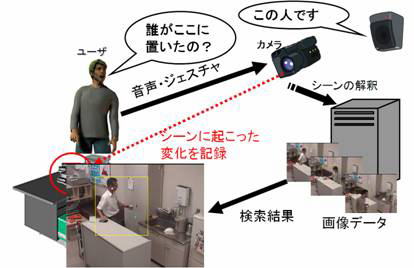 多数の人物が出入りする環境では、誰が物を[持ち込んだ/持ち去った]のか特定することは困難です。室内の様子を撮影した映像がある場合でも、長時間の記録映像から目的のシーンを探し出す作業は労力を要する上に見逃してしまう危険性があります。部屋内イベント監視班では室内への物の持ち込み、持ち去り等のイベントを自動的に検知・収集し、ユーザが物体や空間を指し示して「これを持ってきたのは誰?」「ここにあったものを持っていったのは誰?」のように直観的に問い合わせできるシステムを開発しています。 多数の人物が出入りする環境では、誰が物を[持ち込んだ/持ち去った]のか特定することは困難です。室内の様子を撮影した映像がある場合でも、長時間の記録映像から目的のシーンを探し出す作業は労力を要する上に見逃してしまう危険性があります。部屋内イベント監視班では室内への物の持ち込み、持ち去り等のイベントを自動的に検知・収集し、ユーザが物体や空間を指し示して「これを持ってきたのは誰?」「ここにあったものを持っていったのは誰?」のように直観的に問い合わせできるシステムを開発しています。
|
|
|
手話認識グループ
 手話は、ものごとの意味・内容を手指の動き、表情、動作などで具体的に表していく“視覚的な言語”です。手話認識班では健聴者と聴覚障害者のコミュニケーションを支援する目的で、コンピュータによる自動手話認識の研究を行っています。 手話は、ものごとの意味・内容を手指の動き、表情、動作などで具体的に表していく“視覚的な言語”です。手話認識班では健聴者と聴覚障害者のコミュニケーションを支援する目的で、コンピュータによる自動手話認識の研究を行っています。
|
|
|
自律移動車グループ
 一般家庭での人とロボットの共生を考えるとき、ロボットは人や物に衝突することなく、安心で安全な移動が大切になってきます。 自律移動車班では、障害者の支えとなる福祉サービスロボットのナビゲーションシステムの構築を目指し、日々研究を行っています。 一般家庭での人とロボットの共生を考えるとき、ロボットは人や物に衝突することなく、安心で安全な移動が大切になってきます。 自律移動車班では、障害者の支えとなる福祉サービスロボットのナビゲーションシステムの構築を目指し、日々研究を行っています。
|
|
|
インタラクティブビジョングループ
 インタラクティブビジョン班は画像処理だけでは物体の認識が困難な場合でも、ユーザとの対話を行うことで物体の認識を成功させるという研究を行っています。具体的には、冷蔵庫からユーザーに指定された食品を持ってくることを試みています。 インタラクティブビジョン班は画像処理だけでは物体の認識が困難な場合でも、ユーザとの対話を行うことで物体の認識を成功させるという研究を行っています。具体的には、冷蔵庫からユーザーに指定された食品を持ってくることを試みています。
|
|
|
マニピュレータグループ
 6つの関節から構成される6自由度のロボットアームと9つのアクチュエータ(モータ)から構成される3指ロボットハンドをコンピュータで制御しています。現在はロボットアームを効率よく動作させるための動作計画やカメラ、触覚センサーを用いて物を認識させてロボットハンドに様々な掴み方をさせるということを行っています。 6つの関節から構成される6自由度のロボットアームと9つのアクチュエータ(モータ)から構成される3指ロボットハンドをコンピュータで制御しています。現在はロボットアームを効率よく動作させるための動作計画やカメラ、触覚センサーを用いて物を認識させてロボットハンドに様々な掴み方をさせるということを行っています。
|
|
|
スポーツビジョングループ
 スポーツビジョン班ではゴルフやテニスのスイングフォームを撮影した動画から、そのスイングフォームを自動的に採点したり、アドバイスをしたりすることのできるシステムの開発を目指しています。 スポーツビジョン班ではゴルフやテニスのスイングフォームを撮影した動画から、そのスイングフォームを自動的に採点したり、アドバイスをしたりすることのできるシステムの開発を目指しています。
|
|
|
手形状計測グループ
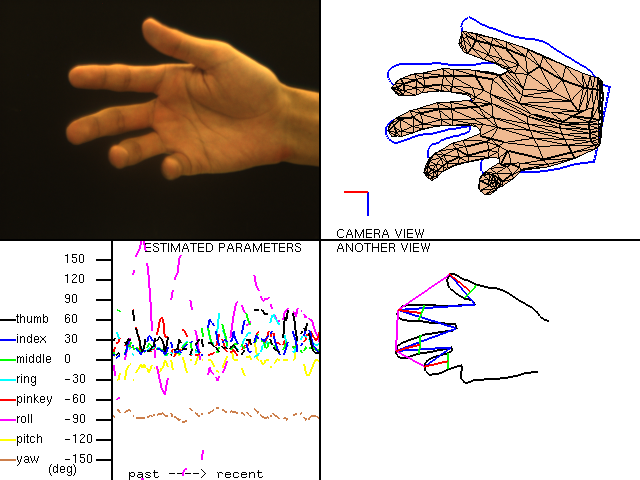 手形状計測班では手の画像から手の関節角度を推定し、ジェスチャ認識や感性評価への応用を目指しています。 手形状計測班では手の画像から手の関節角度を推定し、ジェスチャ認識や感性評価への応用を目指しています。
|
|
|
水中ビジョングループ
 琵琶湖に沈む遺構や遺物を水中ロボットで調査・発掘する場合に、通常のカメラでは泥や土が舞い上がり対象物を把握しにくい。そのため泥や土を画像処理により除去して、対象物を正確に把握することを目的とした研究を立命館大学理工学部ロボティクス学科運動知能研究室の川村貞夫教授と合同で行っている。 琵琶湖に沈む遺構や遺物を水中ロボットで調査・発掘する場合に、通常のカメラでは泥や土が舞い上がり対象物を把握しにくい。そのため泥や土を画像処理により除去して、対象物を正確に把握することを目的とした研究を立命館大学理工学部ロボティクス学科運動知能研究室の川村貞夫教授と合同で行っている。
|
|
|
手技プロセスグループ
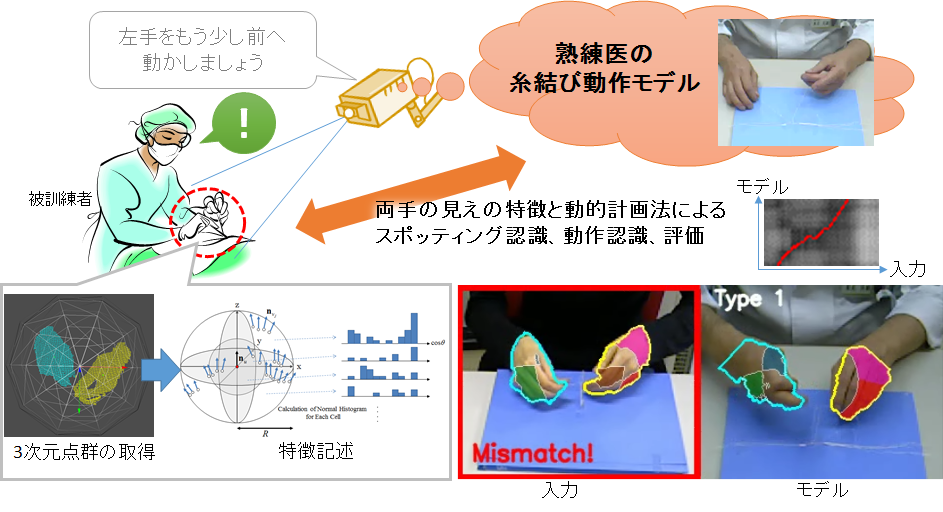 手技プロセスグループでは、手術手技などの高度な手技のプロセスモデリングおよび手技の評価・教示について研究しています。微細な手指の動作を記述し、動作パターンの識別や進行状況の把握、直すべき部分を特定した動作の評価とフィードバックなどを行っています。 手技プロセスグループでは、手術手技などの高度な手技のプロセスモデリングおよび手技の評価・教示について研究しています。微細な手指の動作を記述し、動作パターンの識別や進行状況の把握、直すべき部分を特定した動作の評価とフィードバックなどを行っています。
|
|
過去の研究グループ布把持ビジョングループ
 布把持ビジョン班では、ステレオビジョンで撮像した画像から布製品の3次元形状を認識して、ロボットが布を操作できるように適切にアドバイスできるシステムの構築を目指して研究を行っておりました。 布把持ビジョン班では、ステレオビジョンで撮像した画像から布製品の3次元形状を認識して、ロボットが布を操作できるように適切にアドバイスできるシステムの構築を目指して研究を行っておりました。
|
|
|
ネットワークセキュリティグループ
 近年、インターネットは私たちの生活に欠かせないものとなりました。 それに伴い、ネットワークを経由したPCやサーバに対する攻撃も増加・多様化しています。ネットワークを介して送りつけられる攻撃コードを、CPUに対する命令セットの知識とパターン認識の技術を応用することで検出し、誰もが安全にインターネットを利用できる環境を実現するための研究を行いました。 近年、インターネットは私たちの生活に欠かせないものとなりました。 それに伴い、ネットワークを経由したPCやサーバに対する攻撃も増加・多様化しています。ネットワークを介して送りつけられる攻撃コードを、CPUに対する命令セットの知識とパターン認識の技術を応用することで検出し、誰もが安全にインターネットを利用できる環境を実現するための研究を行いました。
|
|
|
ヒューマノイドグループ
 ヒューマノイドロボット班では、小型ヒューマノイドロボットを用いて、外の環境を認識し、障害物の回避や段差乗り越えを自立的に行える二足歩行ロボットの開発を目指しています。現在、歩行時の姿勢安定制御に重点をおき、研究を行っていました。 ヒューマノイドロボット班では、小型ヒューマノイドロボットを用いて、外の環境を認識し、障害物の回避や段差乗り越えを自立的に行える二足歩行ロボットの開発を目指しています。現在、歩行時の姿勢安定制御に重点をおき、研究を行っていました。
|
|