
Background and Purpose
 In recent years, the service robots (for guiding facility, security and cleanup) have been familiar to our life step by step.
In recent years, the service robots (for guiding facility, security and cleanup) have been familiar to our life step by step.
We assume that such a robot should have not only some useful functions but also natural communication skills.
Our goal is developing a robot which collects important information and provides it to people naturally. The robot has some function such as greeting and communicating people, moving to a specific person for delivering a message, and collecting information from people or internet.
Research Contents
[1] Speech Strategy of Robot for Eliminating Discrepancy in a Population

In sophisticated information society, there are a lot of research about service robot which provide to manage schedule and guide in the building interactively.
However, most interactive systems have problem that the system inform user already know information and can’t follow a change of topic.
In existing research, the system estimates user’s knowledge and intention.
Nevertheless, even if perfect user model is constructed, system informs a part of information its own.
We solve the problem by user’s conviction model to update state of phenomenon with dynamic Bayesian network by collecting evidence for phenomenon desired to guess.
[2] Estimation of Conversation Topics between Users and Utterance Generation
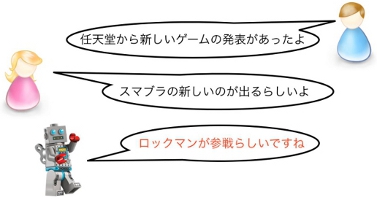
However people often have a conversation for sharing information. Contents of the information is limited to the all participant’s knowledge. A system that provides helpful information is expected. There are many systems that requires user’s query to provide information. On such systems, users should think a question and then ask it. It is not convenience in conversation situation. Therefore, we propose a robot system that can intervene in conversation by understanding topics of the conversation.
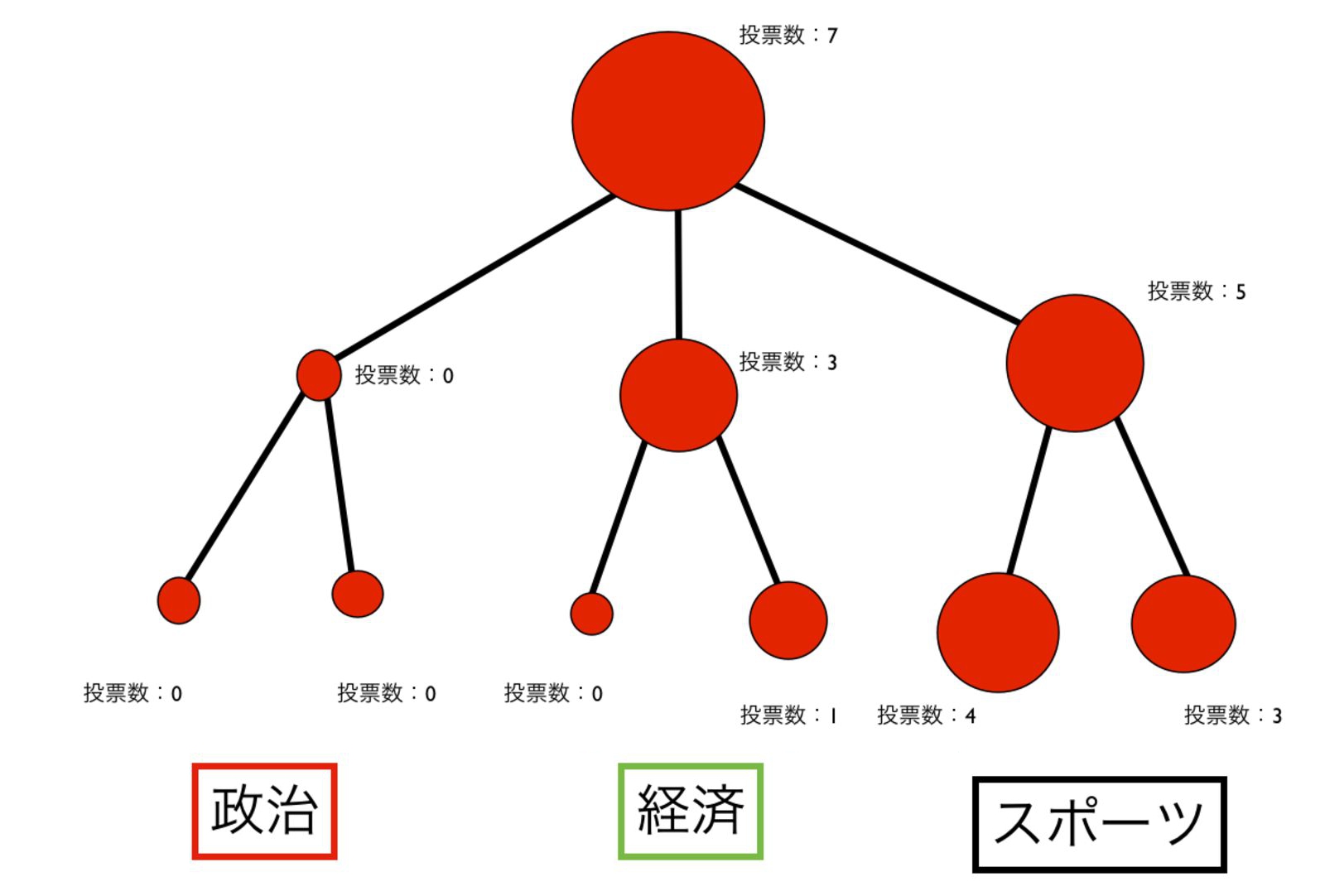
Our key proposal is to create a “cluster tree” of training documents by hierarchical clustering based on HDP-LDA topic model, each node of the cluster tree has “common words dictionary” of the documents hanging down the node.
When users are having a conversation, the system analyzes sequentially the theme of the conversation by voting each word to the node. The node to be voted is decided based on “common words dictionary” of each node. Each path of the tree correspond each theme, so summing up votes in each path correspond voting to each theme. The system can create a “distribution histogram of conversation theme” of the conversation. Our robot system will provide helpful conversation based on the histogram.
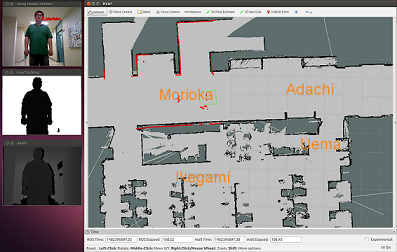
[3] Interaction Robot with Generating Map of Person Position Using ROS
We propose a mobile robot that creating a map of person positions and providing some services based on the map information. We employ Robot Operating System (ROS) for reducing cost of developing basic functions of a mobile robot, and we focus on services which can be provided by the robot.
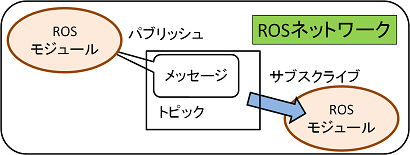
What’s ROS?
・ROS is a middle ware providing modules (libraries and tools) for supporting robot application development.
・ROS provides modules such as mapping, localization and moving.
・Each ROS modules have one function.
・ROS modules can work together by publishing/subscribing information of each module processed.
・In a network, ROS modules can communicate other modules.
・Some ROS module can distribute load of complicated processing.
Current Works
We are developing the robot that creating a map of person positions by personal recognition using RGB-D sensor information. When a user asks the robot using a person’s name, the robot takes the user to mapped position of the person.
Member
・B4 Keisuke Uema ( uema [at] i.ci.ritsumei.ac.jp )
・B4 Yuma Hirai ( yhirai [at] i.ci.ritsumei.ac.jp )
 Access
Access